
The PX4 team is happy to announce a new version of the PX4 Autopilot, v1.12. After ten months (10) of hard work with more than three thousand commits from 154 contributors, PX4 v1.12 is finally out, with lots of significant improvements, new features, and tons of new hardware compatibility. For v1.12, the team focused on improving core functionality, stability, performance, and hardening failsafe operations for all supported vehicles.
How to get the release
You can try the latest release (and older ones) directly from GitHub, you can build the source, or try the pre-built binaries that can be found now on the GitHub releases for the PX4 Autopilot repository (see links below).
You can also load v1.12 directly into your supported flight controller of choice using QGroundControl, through the same procedures as before (see the link to the documentation below).
What’s in v1.12.0 stable
Release Highlights
- Multi-EKF enabled by default (STM32F7 & STM32H7)
- Gyro dynamic notch filtering with onboard FFT
- Optimized rate control sensor pipeline
- Faster and more robust Magnetometer calibration
- New soft iron calibration coefficients
- Automatically determine the rotation of external sensors
- Added support for IRC Ghost, including telemetry
Multi-EKF enabled on F7 & H7 based boards.
Multi-EKF has been available since October 2020 on PX4 but was off by default and only available to however configured their boards to take advantage of the feature. Starting with v1.12, you can expect multiple instances of the EKF to be enabled by default taking advantage of flight controllers with 2 or more IMUs. You can read more about this feature on PR#14650 and PR#16507.
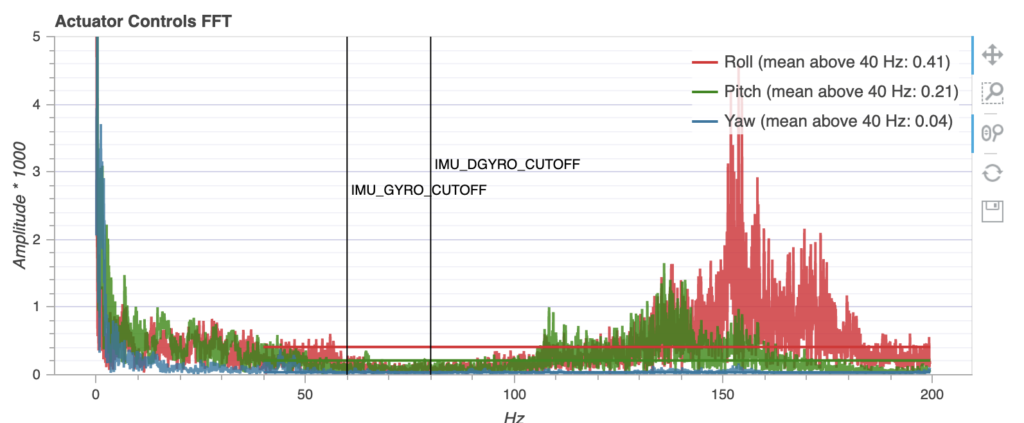
Dynamic notch filtering
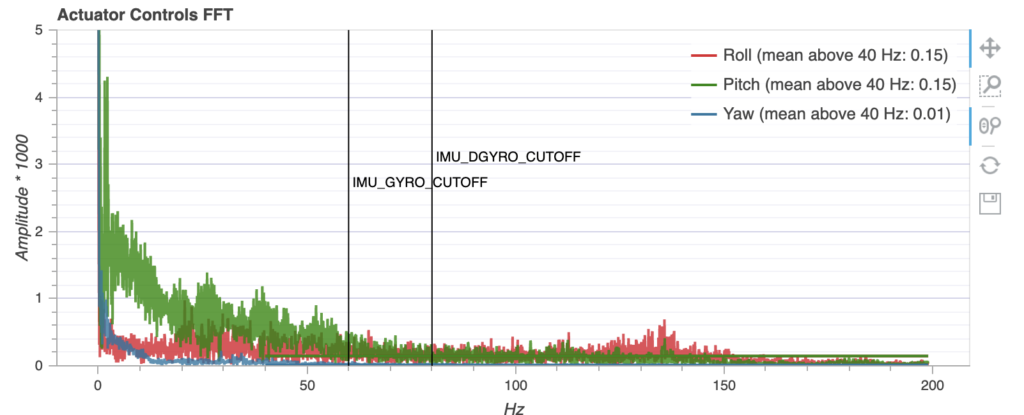
We add dynamic notch filtering to the gyro control data with up to 6 frequencies per axis, updated with estimated peak frequencies PR#16385.
Before
After
Fixed Wing / VTOL
- Significant TECS improvements
- Hardened RTL safety improvements.
UAVCAN
- UAVCANv0 Node: PX4 supported building nodes for many years. Now we support building-specific targets like the CUAV GPS units.
- UAVCANv1 Initial alpha of a complete end-to-end implementation
MAVLink
- Ethernet configuration can be changed dynamically via parameters.
- Support for querying COMPONENT_INFORMATION enables QGC to access
- Metadata from a flight controller to understand which commands are supported.
Multicopter
- More Intuitive stick feel in Position mode
- Hover thrust independent velocity control gains
- Improved rounded turns in waypoints
New Hardware Support
- Pixhawk FMUv6U, FMUv6X
- CUAV X7/X7Pro, Nora, CAN GPS
- SP Racing H7 Extreme
- Bitcraze Crazyflie v2.1
- ARK CAN Flow, CAN GPS
- Freefly CAN RTK GPS
- mRo Ctrl Zero H7
NuttX
- Upgraded from v8.2+ to v10.10.0+
- Multiple performance and stability improvements and security fixes
And many more features and fixes.
The complete list of new features, changes, and fixes can be found on GitHub. We have also included a link to the full changelog for completeness.
Go to the PX4 v1.12.0 Release Notes.»
This release was brought to you by
The PX4 v1.12 release was made possible thanks to contributions from organizations and individuals who firmly believe in open-source and are committed to making PX4 the best autopilot solution in the industry.
Top Contributing Organizations
- Auterion
- Open Source Contributors (no attribution given to any organization)
- Volansi
- NXP Semiconductors Netherlands B.V.
- CUAV
Top Contributing Developers
- Daniel Agar
- David Sidrane
- Matthias Grob
- Beat Kung
- Julian Oes
- Matthieu Bresciani
- Lorenz Meier
- Silvan Fuhrer
- Jacob Crabill
- Jaeyoung Lim