Meet the Contributor

Questions
Can you tell us the story of how you got into PX4?
I met Lorenz Meier at ETH when I was looking for a master thesis. The topic was quite open and new for having “obstacle avoidance” running on real vehicles. I chose to continue the work of Martina Rivizzigno who started on the local planner – so the backbone of the algorithm already existed but a few crucial parts were missing for it to be feasible in the real world, and I’ve been working on those aspects as my contributions.
What company do you work for and what’s your “day role”?
During my master thesis, Auterion was founded. So I experienced the company from the beginnings and joined as a computer vision engineer once my thesis was completed.
What is your current project based on PX4?
Among other topics I kept on working on the local_planner – the algorithm I was working on during my thesis. Of course, this means a lot to me as it was my first project and I feel proud now seeing it run on various drones in more productized fashion.
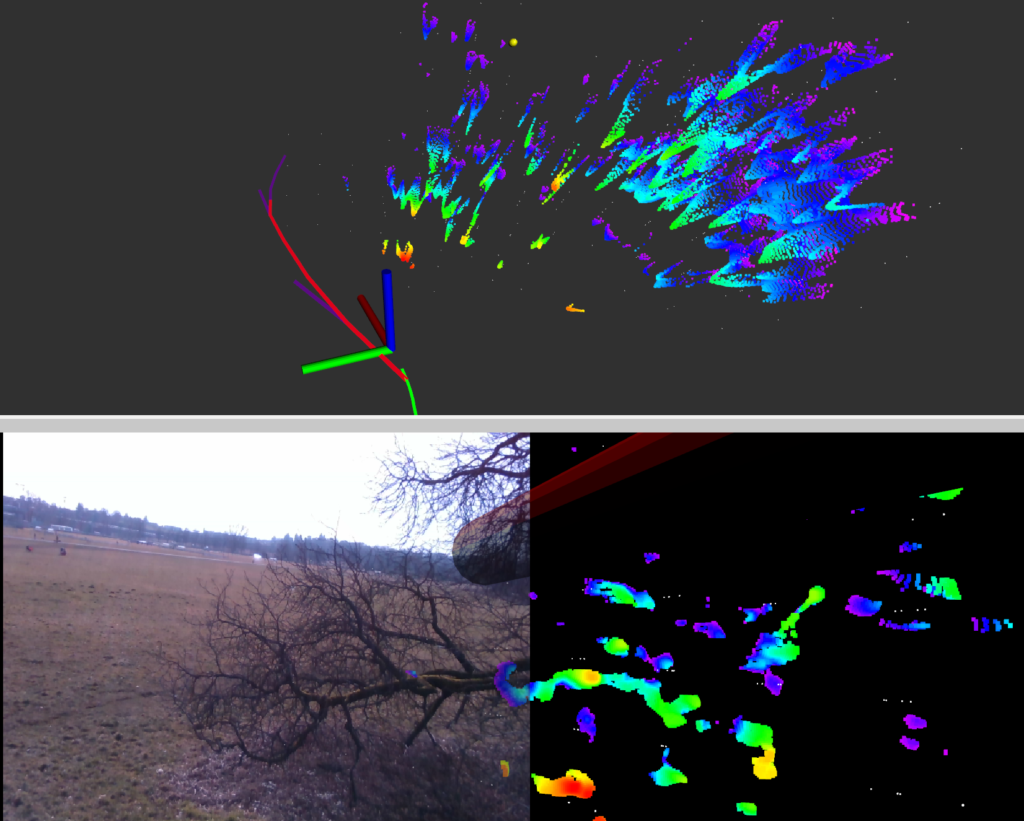
The lower image shows the world how it is perceived by the drone. The color camera has a very narrow field of view, but the infrared cameras produce a wider pointcloud. The colors show how far away an obstacle is, red being close and purple really far. In the top view the result of the avoidance algorithm is shown. It calculates a path towards the goal, which steers clear from obstacles.
What is your professional and educational background?
MSc Mechanical Engineering, ETH 2018
What is your “area of expertise” within PX4?
Next to the avoidance algorithm running offboard on a companion computer I started developing on a more lightweight algorithm called “Collision Prevention” which is running directly on the flight controller. Collision Prevention is a part of the PX4 firmware
What is the most unique thing you have done in drones/robotics?
In my semester thesis before I got to PX4 I used to develop code for a quadrupedal robot. Among others I made it trot over uneven terrain.
What is your current favourite setup for development kit?
We use different companion computers to run the obstacle avoidance algorithm on, e.g. Intel NUC, Intel UP-Core, IMX8M-mini. As well as different autopilot boards such as the Pixhawk 4, Pixracer, etc.
What languages do you speak?
German, English
Where are you from and where did you grow up?
I’m from Switzerland and I grew up outside of Winterthur.
What advice would you give to fellow drone developers who just joined the PX4 community?
It still feels to me like I just joined, there is always so much more to learn. But don’t be too intimidated just start coding and don’t be afraid to reach out for help, all the people are really nice and helpful.
What is your favorite hobby/what do you enjoy to do outside of work?
I do a lot of sports, I’m really into triathlon and in the winter I spend as much time as possible on cross-country skis. I also have a horse. I love her dearly and enjoy spending time with her on long rides through the countryside.
Hello,
I am implementing the Obstacle Detection and Avoidance https://github.com/PX4/PX4-Avoidance
and I got a problem
can you please help me as a consultant to fix it and would you please tell me how much will cost me.
Thank you