This post is derived from the January PX4 2019 roadmap webinar, and provides a high-level overview of features that are currently under active development in the PX4 community.
Architecture
Flight stack – improving robustness
Failsafes
- Contextual failsafe thresholds
- Control performance failsafe
- Failsafe controller: parachute trigger
- Airspeed fault detection
- Multi-stage fallback behaviour
Multi-estimator framework
- A matrix of estimators utilizing all available sensors
- Multiple EKF’s with selection using median and/or innovation failures
Overhauled sensor pipeline
- Higher throughput and lower latency
- Raw sensor logging for vibration analysis, clip detection
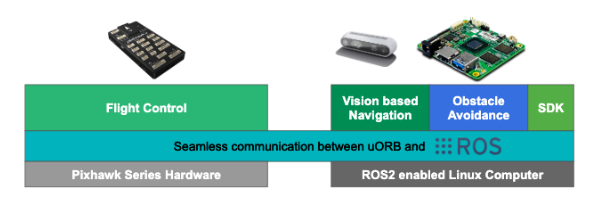
Middleware – future proof hybrid system communications
Native communication with ROS2:
Developer Tools
- Fully supported IDE (vscode)
- Free cross platform IDE
- Single click board select
- Debug simulator or hardware
Computer Vision
Obstacle Avoidance
- Smoother trajectories for more stable airframe
- Higher flight speeds
- Support for platforms with less computational power
- Utilize additional data sources
Vision Based Navigation
- Integration with hardware tracking sources
- More robust integration with software VIO
Reliability
- Improve bench test & flight test procedures (view weekly test reports here)
- Airspace integration
- Failure mode analysis
- Functional safety standards references
Hardware
Pixhawk autopilot standard
- PX4FMU reference designs:
- FMUv5X (Flight Management Unit Gen. 5 High Reliability, F7 MCU)
- FMUv6 (Flight Management Unit Gen. 6, H7 MCU)
- FMUv6X (Flight Management Unit Gen. 6, H7 MCU, with automotive powersupply)
Pixhawk quality standards
- Testing of autopilots and manufacturing standards
Pixhawk autopilot bus (PAB)