PX4 is not just an open source autopilot project, it is also a global community of drone developers and users. With the current COVID-19 pandemic, more people are transitioning to remote work, and working remotely requires effective use of online collaboration tools.
We would like to share this blog to show how you can better utilize some of the current PX4 collaboration tools, so you can leverage the PX4 community to gain more value out of the ecosystem for yourself as an individual developer and/or as a company.
The flowchart below is a general guideline on how and when these tools should be used.
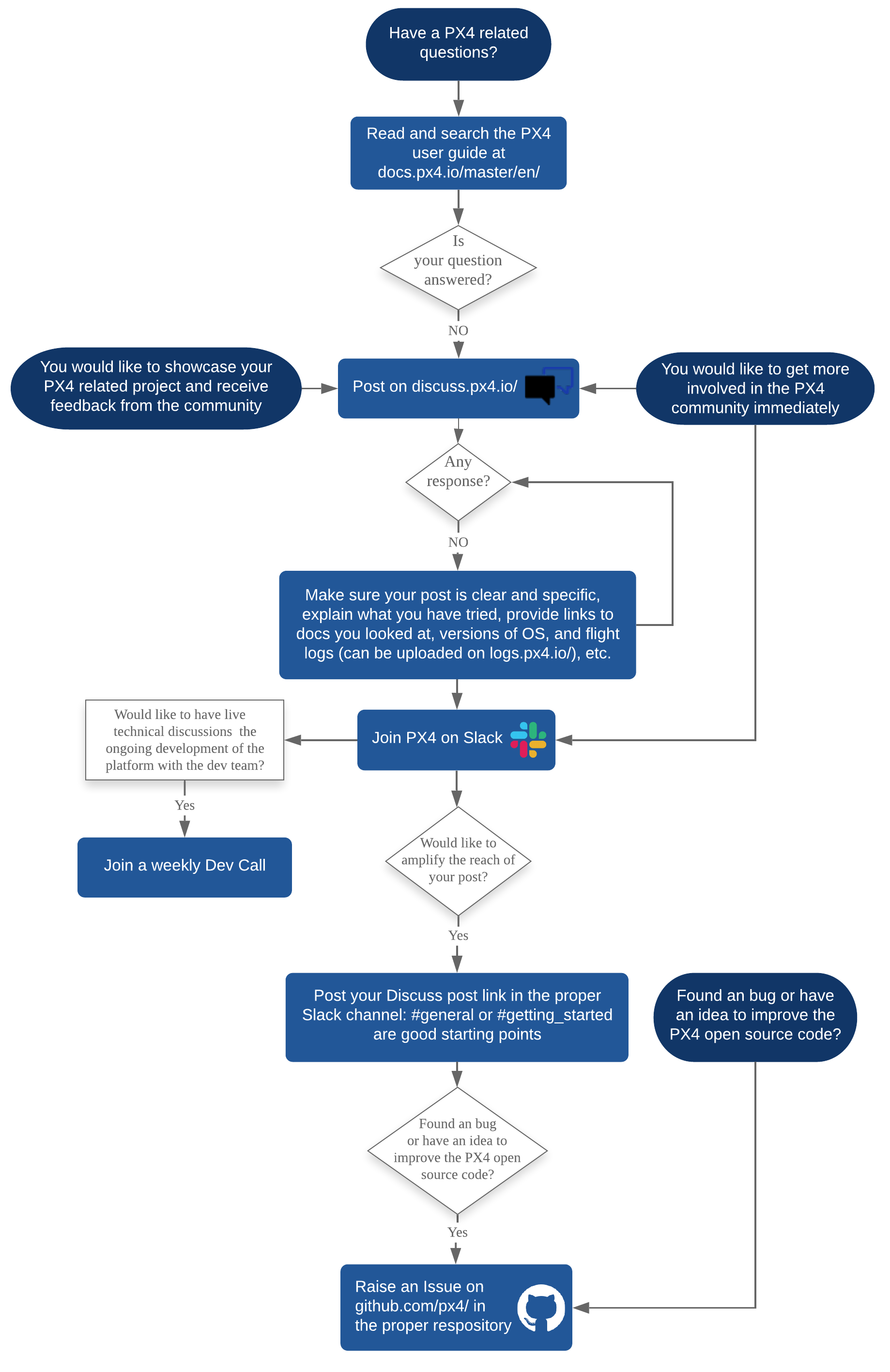
Let’s go through the top 3 collaboration tool to leverage the PX4 community online.
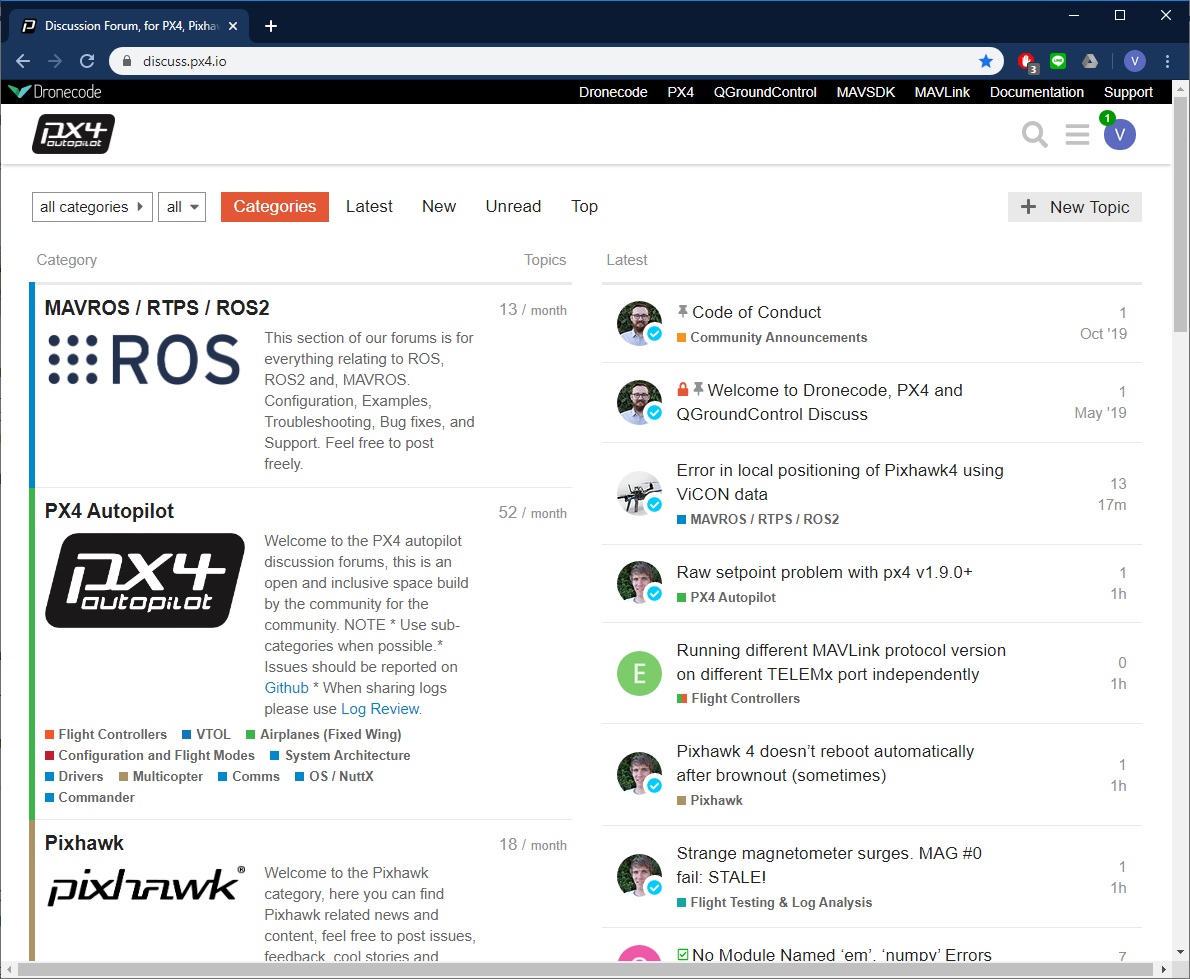
This is the official forum for discussions and announcements related to PX4. There are many different discussion categories to choose from such as PX4 Autopilot, Pixhawk, Flight Testing & Log Analysis, MAVSDK, QGroundControl, MAVLINK, Computer Vision, etc.
You can use this forum to ask questions, join discussions, debug issues, share flight logs, and much more. Flight logs can be uploaded at https://logs.px4.io/ so it can be easier to share with other members for analysis.
Community members can contribute to the different projects by providing comments, feedback, and suggestions. Product managers use it for announcements and user feedback, developers use the “Looking for opportunity” category to put themselves on the job market, and companies use “Looking for Developers” to recruit talent.
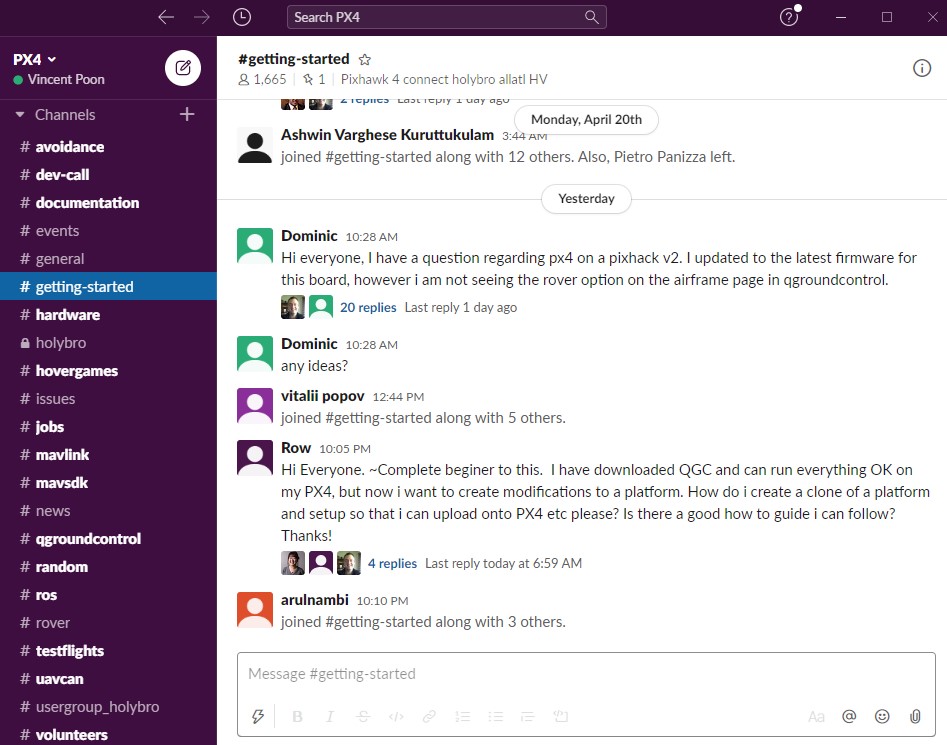
You can register and join PX4 Slack at http://slack.px4.io/. There are currently over 4000 registered users on this platform. All the core maintainers are reachable here as well
# Channels – Each “#” channels in PX4 Slack are organized by topics, you can choose to join any channel you are interested in and get involved with the community immediately.
Community Support – If you posted on discuss.px4.io/ does not get a response, you can use Slack to amplify your reach by posting your discuss link in the proper channel.
PX4 Maintainers use certain channels to answer questions (#MAVSDK, #QGC, etc.), and vendors also use certain channels to provide support on their products (#usergroup_cuav, #usergroup_holybro, etc.).
Weekly Dev-Calls (Open to Everyone) – The PX4 Autopilot dev team hosts a weekly coordination call, the current state of the project gets discussed as well as any pending open PRs/Issues brought forth by the community. There is also space in the agenda to discuss pull requests, major impacting issues and Q&A.
The dev-calls are open to all interested developers (not just the core dev team). This is a great opportunity to meet the team and contribute to the ongoing development of the platform. Please join the #dev-call channel for reminders or go to discuss.px4.io/c/weekly-dev-call for more information.
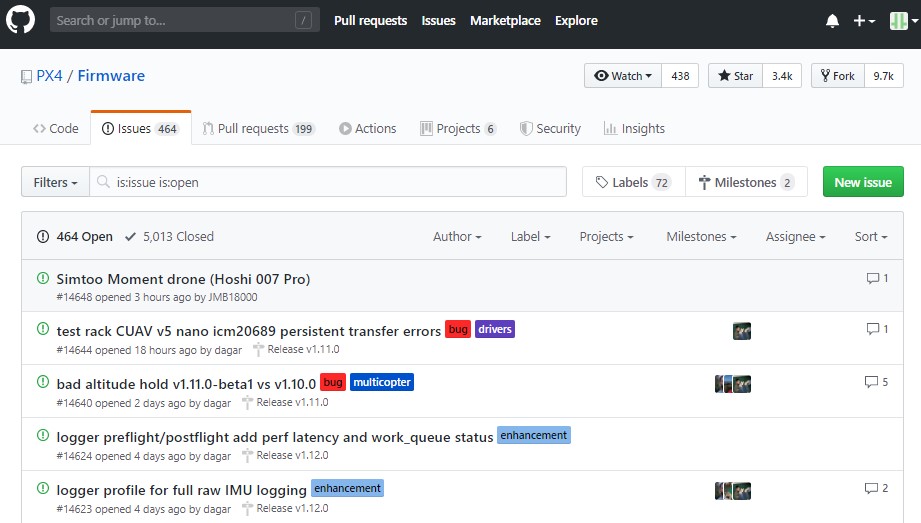
Raise Issue – If you want to report a bug or have an idea to improve the PX4 open source project, raise an issue on the proper github repository on github.com/px4/. Maintainers and fellow community developers will look into the issue.
Pull Request (PR) – If you have something to contribute to the code like a bug fix or adding a new feature, you can start a Pull Request to engage with the community. This is your contribution to make the open-source PX4 project better. For more information on how to contribute code to PX4, check out dev.px4.io/master/en/contribute/