NXP hosted the first HoverGames Challenge: Fight Fire with Flyers contest in May 2019. Previously, we did the part 1 of the contest review. You can go check it out by clicking here if you haven’t seen it.
The contest attracted drone developers from around the world (see map below) with different backgrounds to come up with creative ways firefighters could use drones to protect and save lives. Contestants had to submit their project to Hacksters.io and were judged on general documentation, video and photos, code & contributions, inventiveness, and technical depth.
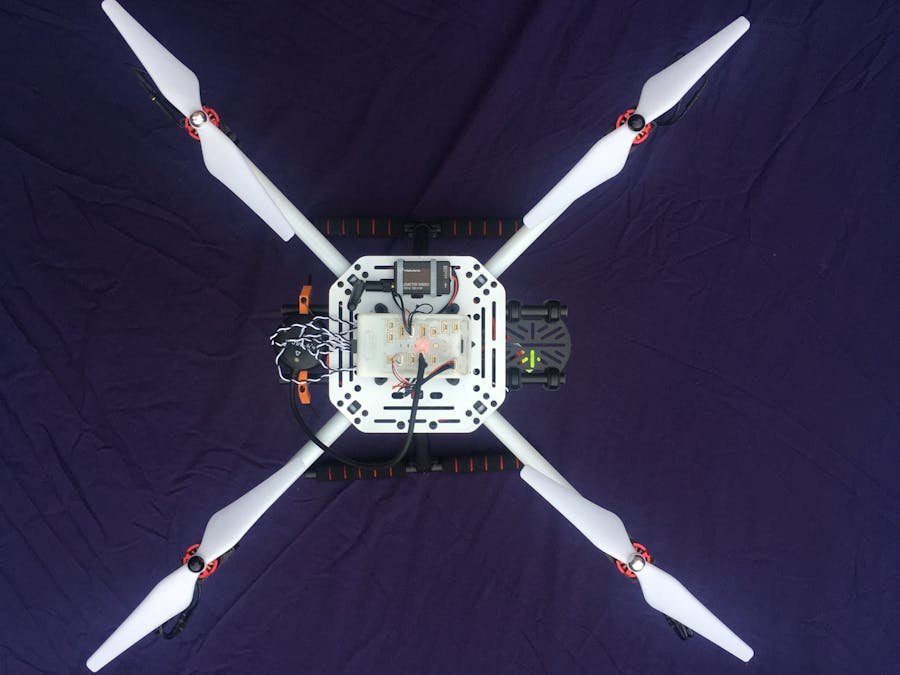
Each contestant started with a HoverGames drone development kit (KIT-HGDRONEK66) as a drone platform. This professional developer kit provides the RDDRONE-FMUK66 flight management unit, BLDC brushless motors, ESCs motor controllers, propellers, RC remote controller, carbon fiber frame, and miscellanous cables, screws, and tools. This flight management unit is supported by our PX4 flight stack.


We have selected some more of our favorite projects from the contest to share with the PX4 community.
Let’s first look at some of the choices of hardware these developers used.
| Project | Companion Computer of Choice | Sensors Used for Detection or Display Hardware |
| Hot Spotter | Raspberry Pi 3 Model A+ |
Melexis MLX90614ESF-BCC infrared thermometer LIDAR-Lite V3 (Garmin) |
| Fire Rescue UAV Drone | Raspberry Pi 3 Model B+ | Pixy2 Vision Sensor |
| BRETT: The fire mapping drone | Raspberry Pi Zero Wireless |
Raspberry Pi Camera Module V2 Melexis MLX90614ESF-BCC infrared thermometer |
| TheFlyingScotsDrone_NXP | Teensy USB 3.1 Development Board | Adafruit Nexo Pixel Digital RGB LED STrip |
| Air To Ground Display: Drone Mounted Ground Visible Display | Teensy USB 3.2 Development Board | DOT Matrix 8×32 Display – HT1632C – RED |
Now let’s take a look at some of the projects:
Hot Spotter
Dronecode Award by Dronecode.org
By Physicsman from Seattle, Washington
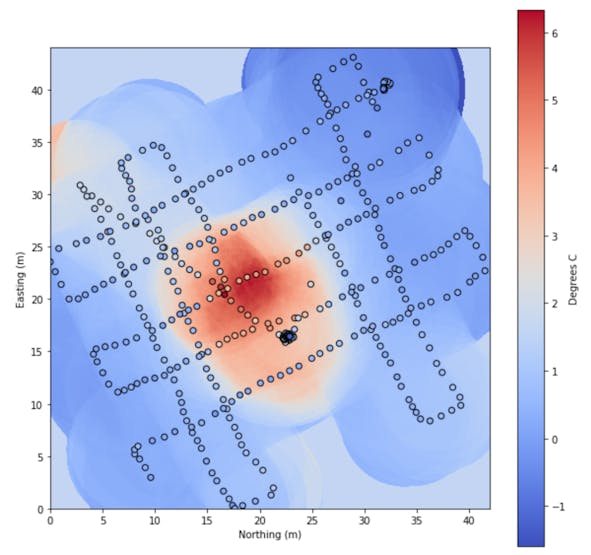
The ‘Hot Spotter’ is an autonomous drone capable of discovering smoldering fires and reporting their location. The drone achieves this by creating a heat map which it generates in real time by combining the data from a thermal sensor (MLX90614ESF-BCC), distance sensor (LIDAR-Lite V3), position sensor (GPS), and the orientation of the drone (attitude telemetry via MAVLink).
Since the thermal sensor has a 35 degree field of view, and the angle it is pointing at is affected by the orientation/tilt of the drone. The location of the hot spot was determined by calculation of the distance from the ground captured from the LIDAR and the drone attitude data. The LIDAR also opens up the possibility of terrain following, obstacle avoidance and generally increases the utility of the drone.
You can see that in this video to the right, the heat map is very coarse at the beginning. As it moves back and forth and the drone sees the same spot multiple times, the resolution increases rapidly. That GPS coordinates of the charcoal fire captured on the map was then compared to the physical location of the fire, the accuracy was found to be within 1 meter.
Fire Rescue UAV Drone
Unicorn Award, for most unusual, interesting, creative or environmental friendly idea, determined by Arm.
By Fin Mead from Ipswich, United Kingdom
Fin Mead created an Intelligent UAV drone with fire detection features, alert system, and an Adaptive Payload Transport and Deployment System. This project incorporates many different ideas into one drone.
This project has a fire detection system using a Pixy 2 Vision Sensor with tilt servo system attached, giving it a wider angle of detection. The drone is equipped with a bright LED brake light from a car and a siren buzzer.
Fin applied for Twitter API access and installed the python library for accessing the twitter API on the companion computer, so that the drone has the ability to live tweet status and photos once the drone detects a fire.
There is also an Adaptive Payload Transport and Deployment System that can transport and deploy various rescue objects like first aid kit, oxygen tank, and radio remotely by using the 3D printed mounts Fin 3D printed.


TheFlyingScotsDrone_NXP
By Jeff Loeliger (Electronic Systems Engineer working for NXP)
Amy Loeliger & Douglas Wheeler (University of Strathclyde Electrical Engineer student and Computer Science student)
from Scotland, United Kingdom
This project aims to tackle the challenge of detecting people in large areas and provide directional signal to the people. This team has chosen a very unique way to detect the presence of people nearby. Since most people carry their cell phone with them at all time, this team uses a cell phone detector circuit to detect mobile phone signals. Even when a mobile phone does not have a signal, it will still send out radio waves looking for a base station. This team is using an existing circuit (https://www.electronicshub.org/cell-phone-detector-circuit/) to try to detect these signals.
The team chose to put NeoPixel LEDs on the bottom of each of the arms of the drone. Because these are multi-colored LEDs controlled by a serial signal, it gives the ability to create any pattern and color. A green arrow can be used to show the direction to safety. An Arduino compatible Teensy 3.1 was used to control the NeoPixels.
You can see the TheFlyingScotsDrone_NXP in action in the youtube video below.
BRETT: The Fire Mapping Drone
BRETT: The fire mapping drone
By Jonathan Xu (Software Engineering student from University of Waterloo), Jason Guo, William Qin, Ricky Mao, and Joshua Cheng.
This team created an autonomous and safe option for mapping out forest fires in real time.
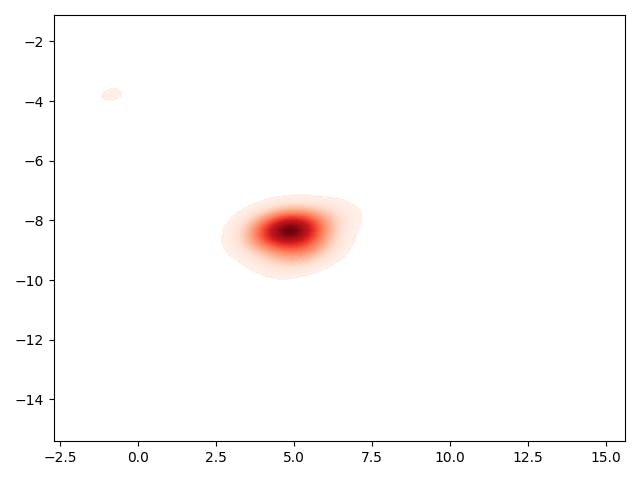
This drone can fly autonomously in a large area and captures infrared readings using a Melexis IR sensor while taking images with a PiCamera of the area below it at a constant rate.
The team tested their functional prototype by using a controlled campfire as the heat source, then the drone was flown automatically with a pre-planned flight from QGroundControl. The data were taken from the SD cards in the companion computer and flight management unit post flight.
The images were stitched together using an image stitching program written by the team in Python primarily using the OpenCV library. A IR heat map was generated with the help of Seaborn and Matplotlib library, and then the final product was created by overlaying the heatmap onto the stitched image to create an intuitive view of the current status of the forest fire.


Air to Ground Display: Drone Mounted Ground Visible Display
By Team dronescan: Jasper Pons from Durban, South Africa
Drones are good at collecting data (photos, videos), but they are not good at distributing information. This project incorporates a highly visible text display on a drone. This flying “billboard” can display readable messages on a big LED panel in a fire situation to give instruction to the trapped, lost, or unaware people.
For example, the following messages can instantly be displayed on the drone: “STOP”, “WAIT”, “FOLLOW”, or “RUN”.
In some situations the drone will be above the people for whom the message is intended, Jasper added a servo motor on the drone so that the angle of the display can be remotely adjusted so it can be facing down.
With a Particle Boron LTE IoT Development Board on the drone, the text on the display and the display angel of the panel can both be changed remotely by logging onto a website using any connected device with a browser(smartphone, PC).
